Irreducible Minkowski Tensors (IMTs) provide a systematic, robust and quantitative characterization of shapes. For this introduction, we focus on 2D shapes that are convex sets, even though the anisotropy analysis remains useful for non-convex structures. We will also assume that the shape has a (piecewise) smooth contour, like a polygon for instance. Finally, we focus on the translation-invariant tensors, which are most commonly used. (For people already familiar with Cartesian Minkowski tensors, the IMTs discussed here are an alternative representation of the  tensors. The 3D version of Irreducible Minkowski Tensors is described here.)
tensors. The 3D version of Irreducible Minkowski Tensors is described here.)
Irreducible Minkowski Tensors (IMT)
Irreducible Minkowski Tensors quantify the geometry of the interface of a shape. The lowest order is the perimeter, i.e. the length of the boundary of the shape. Higher orders quantify the deviation of a shape’s boundary from perfect isotropy (i.e., a circle in 2D, or a sphere in 3D). For simplicity, let us consider a polygonal shape:
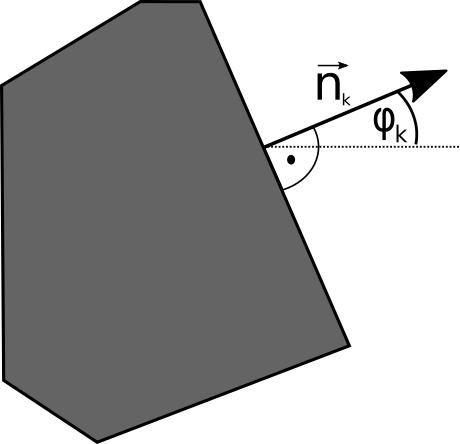
Here  is the lengths of the
is the lengths of the  -th edge, and
-th edge, and  is the outer normal vector of the -th edge. Moreover, we define the vectors,
is the outer normal vector of the -th edge. Moreover, we define the vectors,
 .
.
Note that the vectors are just the edges of the polygon, rotated by 90 degrees. It is useful to realize that a convex polygon can be uniquely reconstructed if we know the set of vectors  : We simply concatenate the vectors , sorted by the angle they span with the
: We simply concatenate the vectors , sorted by the angle they span with the  axis, and obtain a copy of the original polygon, rotated by 90 degrees:
axis, and obtain a copy of the original polygon, rotated by 90 degrees:
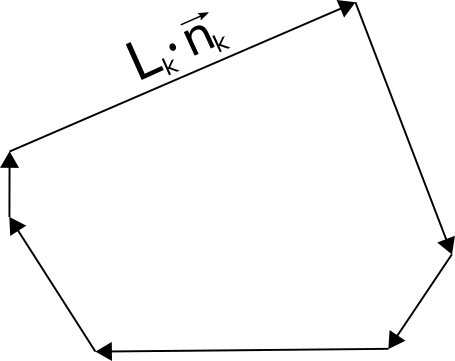
Because the sorted the vectors by their polar angle, the reconstructed shape is convex. (Clearly, the mapping between polygons and their set of vectors  is only one-to-one if and only if the polygon was convex in the first place.)
is only one-to-one if and only if the polygon was convex in the first place.)
We now define the normal density as the function

where  is Dirac’s delta distribution:
is Dirac’s delta distribution:
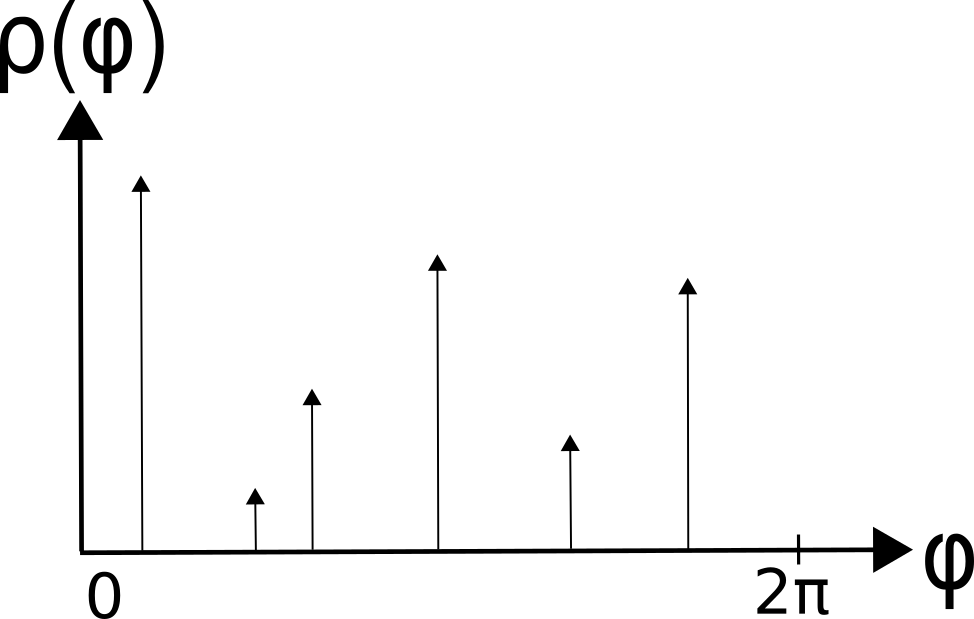
The function  characterizes the interface of the shape
characterizes the interface of the shape  . (The function is sometimes referred to as the extended Gaussian image, or EGI).
. (The function is sometimes referred to as the extended Gaussian image, or EGI).
This function is degenerate in our case (it consists only of Dirac ‘s) because we analyzed a polygonal object. If the shape’s interface had had smooth curved parts, the normal density function would have featured a smooth component as well (we will find examples below).
Minkowski analysis
The key idea of IMTs is to decompose the normal density into the irreducible representations of the rotation group. In two dimensions, this is merely the well-known Fourier series of a  -periodic function ,
-periodic function ,
 .
.
The complex numbers  are the Irreducible Minkowski Tensors. Knowing all
are the Irreducible Minkowski Tensors. Knowing all  (all Fourier coefficients), we can reconstruct the function
(all Fourier coefficients), we can reconstruct the function  , and thus, the convex shape we started with. Because the are the Fourier coefficients of a real function, they obey the Hermitian symmetry,
, and thus, the convex shape we started with. Because the are the Fourier coefficients of a real function, they obey the Hermitian symmetry,  . The zeroth coefficient is precisely the perimeter of the shape,
. The zeroth coefficient is precisely the perimeter of the shape,  . For any closed contour, we saw above that the vectors
. For any closed contour, we saw above that the vectors  sum to zero. This has the consequence that
sum to zero. This has the consequence that  . Any higher IMTs contain shape information about the anisotropic nature of the contour.
. Any higher IMTs contain shape information about the anisotropic nature of the contour.
Loosely speaking, the tensor described the component of the interface with  -fold, but not higher, symmetry. The shape information contained in the various ,
-fold, but not higher, symmetry. The shape information contained in the various ,  , is disjoint: For example,
, is disjoint: For example,  contains the 3-fold part, but not the 6-fold, 9-fold symmetric part of . For example,
contains the 3-fold part, but not the 6-fold, 9-fold symmetric part of . For example,  is the quadrupole component of the normal density, and
is the quadrupole component of the normal density, and  , again, is the monopole part (the perimeter of the shape). Closed contours cannot have a dipole part, thus
, again, is the monopole part (the perimeter of the shape). Closed contours cannot have a dipole part, thus  .
.
Minkowski synthesis
The mapping between convex shapes and their set of IMTs  is bijective, i.e., every sufficiently smooth shape has a unique function
is bijective, i.e., every sufficiently smooth shape has a unique function  , and thus Fourier coefficients . Conversely, there is at most one convex shape for a prescribed set of IMTs: Via the Fourier series, we can reconstruct the function from the coefficients , and if is a non-negative function, then it defines a unique convex shape with that normal density (“Minkowski synthesis”; this is the solution of the Minkowski problem). This is how we have generated the following image:
, and thus Fourier coefficients . Conversely, there is at most one convex shape for a prescribed set of IMTs: Via the Fourier series, we can reconstruct the function from the coefficients , and if is a non-negative function, then it defines a unique convex shape with that normal density (“Minkowski synthesis”; this is the solution of the Minkowski problem). This is how we have generated the following image:
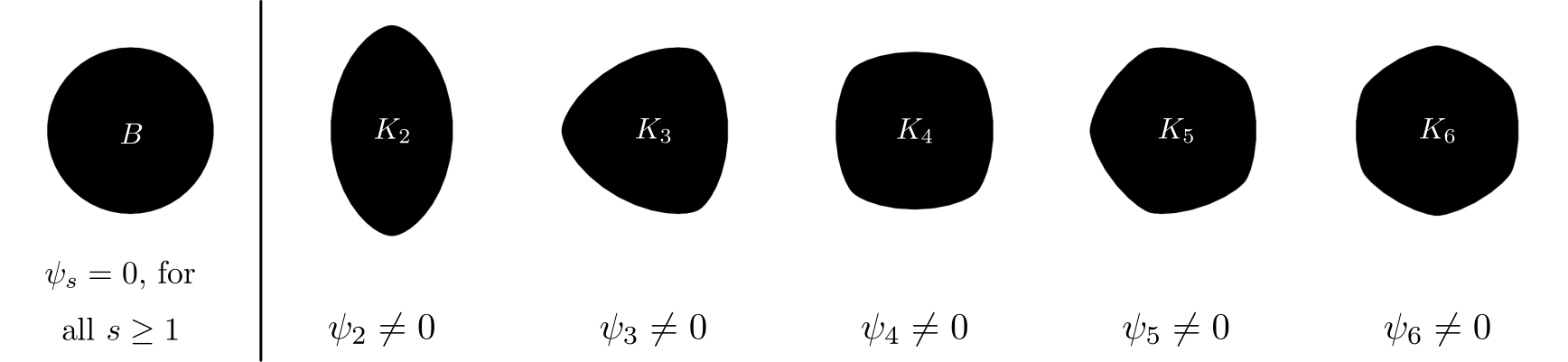 with
with  vanish (left). If there is a single Fourier component
vanish (left). If there is a single Fourier component  non-zero, the choice of
non-zero, the choice of  defines a convex shapes with an -fold rotational symmetry.
defines a convex shapes with an -fold rotational symmetry.These shapes  are characterized by a particular , i.e., all coefficients vanish
are characterized by a particular , i.e., all coefficients vanish  , save for , and
, save for , and  . Their normal density function is a pure sine wave offset such that it is nonnegative,
. Their normal density function is a pure sine wave offset such that it is nonnegative,  . (One could term the football shape
. (One could term the football shape  the “ideal quadrupole” in that it only features a quadrupole component in its normal density. The tensor is connected to the well-known Cartesian Minkowski Tensor
the “ideal quadrupole” in that it only features a quadrupole component in its normal density. The tensor is connected to the well-known Cartesian Minkowski Tensor  .)
.)
-th irreducible Minkowski tensor is connected with an -fold rotational symmetry. We note that the shapes in the previous image are smooth objects (save for the pointy tips), because their normal density is a pure sine wave. To construct regular polygons, higher-order Fourier modes must be added. For example, a regular triangle  with unit sides features nonzero IMTs
with unit sides features nonzero IMTs  :
:


 .
.
The unit ball  has the normal density
has the normal density  and is perfectly isotropic. Consequently, we find that the perimeter is
and is perfectly isotropic. Consequently, we find that the perimeter is  , and all other IMTs
, and all other IMTs  .
.
Rotations
Rotating a shape in the plane amounts to shifting the function  , that is, a shift of the complex phases of all . More precisely, a counterclockwise rotation by angle
, that is, a shift of the complex phases of all . More precisely, a counterclockwise rotation by angle  modifies the IMTs
modifies the IMTs

Here  is the operator that rotates a shape by the given angle.
is the operator that rotates a shape by the given angle.
Translations and scalings
Translating the shape in the plane does not modify the IMTs; they are translation-invariant. Scaling by a linear factor  changes the IMTs by a factor as well; they are of homogeneity 1, as the perimeter.
changes the IMTs by a factor as well; they are of homogeneity 1, as the perimeter.
 ,
,
 .
.
Minkowski Structure Metrics qs
Frequently, the orientation and size of an object is not of interest, and a metric invariant under rotation, scaling, and translation is required. This is provided by the Minkowski Structure Metrics (MSMs)  . These shape indices are defined as
. These shape indices are defined as
 .
.
The are invariant under rigid motions (rotation and translation) and scaling of .
detects the presence of -fold-symmetric component in the normal density.
For example,  is sensitive to the quadrupole component, and is sensitive to rod-like shapes.
is sensitive to the quadrupole component, and is sensitive to rod-like shapes.  can be used to find shapes with predominantly threefold symmetry, such as equilateral triangles.
can be used to find shapes with predominantly threefold symmetry, such as equilateral triangles.  is used to detect regular hexagons, and to find hexagonal order in 2D packings (in this application the IMTs are a refinement of Steinhardt’s bond-orientational order parameters [bibcite key=mickel2013shortcomings]).
is used to detect regular hexagons, and to find hexagonal order in 2D packings (in this application the IMTs are a refinement of Steinhardt’s bond-orientational order parameters [bibcite key=mickel2013shortcomings]).
The are fingerprints of a particular class of shapes, and blind to rotation and scaling. The may thus be used to classify shapes, ignoring their size and orientation.
Distinguished directions
Each of Minkowski tensor of rank distinguishes spatial directions. These are the directions in which “most” of the interface is oriented. We can calculate the preferred directions of a body from its Minkowski tensor via the complex argument of :
direction angle =  for
for 
Specifically for , the quadrupole, the distinguished directions are the antipodal vectors with the direction angles
 and
and 
For an interactive illustration, see morphometer.